Rendering¶
Each Meta-World environment uses Gymnasium to handle the rendering functions following the gymnasium.MujocoEnv interface.
Upon environment creation a user can select a render mode in ('rgb_array', 'human').
For example:
import metaworld
import random
env_name = '' # Pick an environment name
render_mode = '' # set a render mode
env = gym.make('Meta-World/MT1', env_name=env_name, render_mode=render_mode)
obs = env.reset() # Reset environment
a = env.action_space.sample() # Sample an action
obs, reward, terminate, truncate, info = env.step(a) # Step the environment with the sampled random action
Render from a specific camera¶
In addition to the base render functions, Meta-World supports multiple camera positions.
camera_name = '' # one of: ['corner', 'corner2', 'corner3', 'corner4', 'topview', 'behindGripper', 'gripperPOV']
env = gym.make(env_name=env_name, render_mode=render_mode, camera_name=camera_name)
The ID of the camera (from Mujoco) can also be passed.
camera_id = '' # this is an integer that represents the camera ID from Mujoco
env = gym.make(env_name=env_name, render_mode=render_mode, camera_id=camera_id)
Camera views may be rotated in this documentation for optimal presentation.
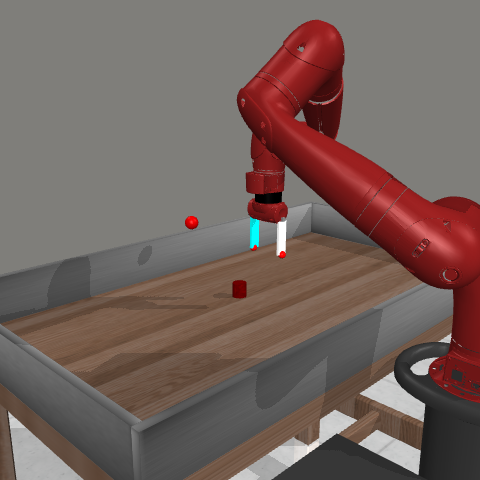
corner or id: 1
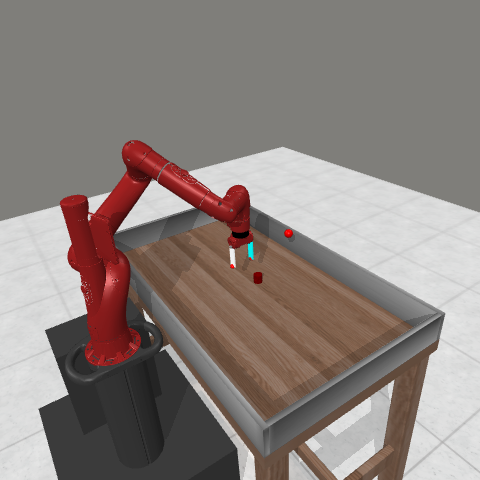
corner2 or id: 2
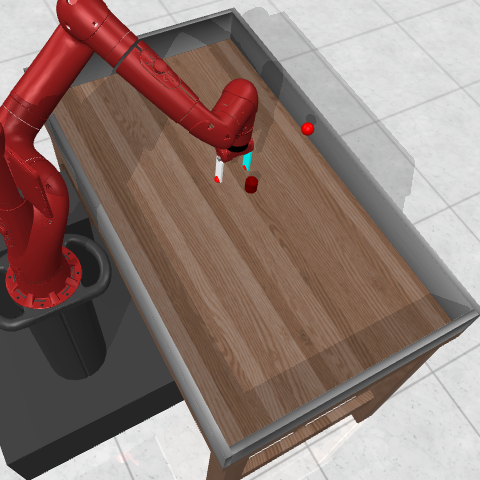
corner3 or id: 3
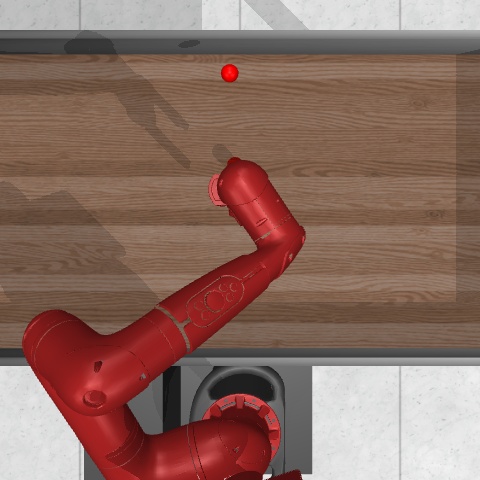
topview or id: 0
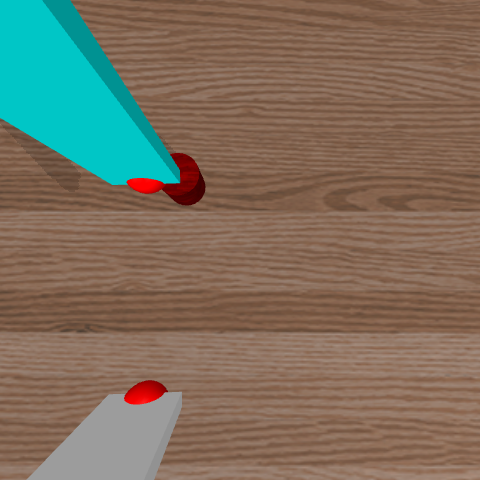
behindGripper or id: 4

gripperPOV or id: 5